

- This event has passed.
A task space motion planning algorithm for nonholonomic systems based on Lie-algebraic evaluation of intermediate configurations
Presented by
Arkadiusz Mielczarek
Department of Cybernetics and Robotics
Wrocław University of Science and Technology
Sign up for the event now
Abstract
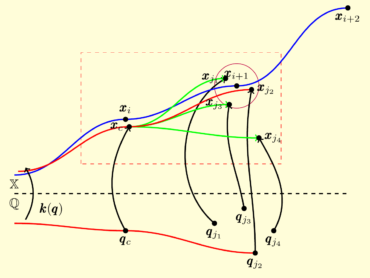
The vast majority of motion planning methods for nonholonomic systems (which include, but are not limited to, wheeled mobile robots) are well-established in the configuration space. However, this space is often not optimal for practical tasks such as collision avoidance. It is common to describe obstacles in a space that is a projection of a nonholonomic system’s configuration space, e.g. (x,y) coordinates in the case of wheeled mobile robots. During the presentation, a modified version of the Lie-algebraic motion planning method for a nonholonomic system with an output function will be introduced. Planning in the task space (usually a subspace of the configuration space) provides more opportunities for optimization in the null space. To exploit this fact, an easy-computable algorithm for an intermediate configuration evaluation will be presented along with a comparison of its results with the energy cost of motion. Finally, a multi-step trajectory planning algorithm that optimizes the energy of motion using the aforementioned evaluation will be discussed.
Presenter biography
Arkadiusz Mielczarek is a PhD student in the Department of Cybernetics and Robotics of the Wrocław University of Science and Technology. He received his MSc degree in control theory and robotics in 2016 from the same university. His research interests include nonholonomic motion planning, nonlinear control theory and signal processing (mainly in bio-medical applications).
