

- This event has passed.
E3MoP: Multi-layer Real-time Efficient Motion Planning for Mobile Robots
Presented by
Dr. Xuebo Zhang
Department of Intelligent Science
Nankai University, China
Sign up for the event now
Abstract
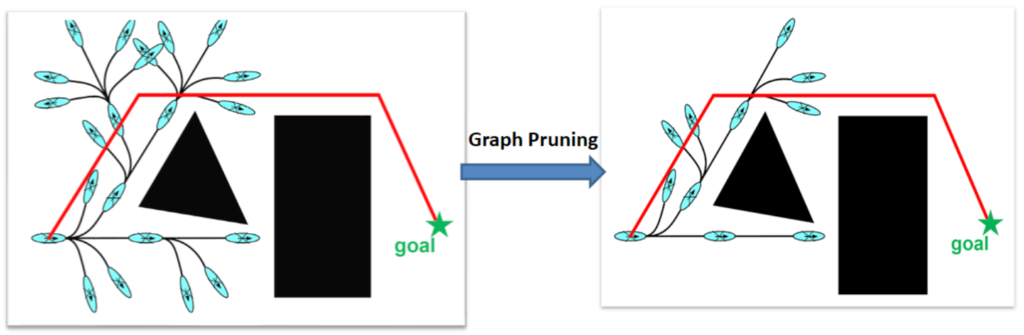
As one of the most fundamental research topics in robotics, high-performance motion planning is still challenging in many applications because it needs to consider many constraints as well as many performance indexes simultaneously, such as computational efficiency, motion efficiency, safety issues, smoothness, uncertain environmental factors, robot kinematic and dynamic constraints, and so on. In this talk, I will discuss our recently developed motion planning approach called E3MoP, a three-layer efficient motion planning framework consisting of global path planning, local path planning and velocity planning. For global planning, I will talk about a new heuristic-guided approach to increase the computational efficiency with lower memory consumption. For local planning, a decoupling framework consisting of local path planning and velocity planning, will be discussed. A sparse optimization approach to generate a safe and smooth local path will be presented, and then a real-time, complete and time-optimal velocity planning approach that was proposed to generate the most efficient trajectory along the preplanned path with rigorous mathematical proofs. Such a hierarchical motion planning framework has been experimentally verified, and comparative results showed its remarkable improvements in terms of computational efficiency, motion efficiency, and the trajectory flexibility to help robot navigation in challenging environments.
Presenter biography
Dr. Xuebo Zhang received the B.Eng. degree in Automation from Tianjin University in 2006, China, and the Ph. D. degree in Control Theory and Control Engineering from Nankai University in 2011, China. From July 2011, he joined the Institute of Robotics and Automatic Information Systems (IRAIS), Nankai University, China. Currently, he is a full professor and the head of Department of Intelligent Science. His research interests include planning and control of autonomous robotic and mechatronic systems with focus on time-optimal planning and visual servo control; intelligent perception including robot vision, visual sensor networks, SLAM, etc. Prof. Zhang is the PI of more than 20 projects across both academic and industrial fields. He is a Technical Editor of the IEEE/ASME Transactions on Mechatronics and the Associate Editor for ASME Journal of Dynamic Systems, Measurement and Control.
